研究について
RESEARCH
ミックスト・リアリティー(複合現実、MR)
歩行の再建
麻痺や変性疾患などに起因する歩行障害を治療するには、練習課題として二足歩行が再現できること、課題において歩行制御の回復を促す感覚入力を提供すること、が重要です。
近年では種々の歩行補助機器が開発されて、重度な患者さんに対しても二足歩行の再現が可能となってきており、歩行スキルを向上させるための入力をどのように提供するかが、歩行の再建に向けた重要な研究テーマとなっています。
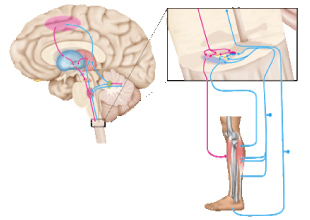
歩行の立脚期における下肢伸筋群の筋出力は、下腿三頭筋Golgi腱器官をはじめとする圧受容器(図A青色で示す求心路)によって約50%が管理されており、これらの賦活は立脚期支持力を高め、屈筋群賦活による遊脚期への移行を抑制します。
図A
麻痺側と非麻痺側の両者が存在する片麻痺歩行では、非麻痺側下肢によって麻痺側圧受容器の賦活を制御することで、麻痺側振り出しを促通する歩行制御が用いられることが多く、この歩行パターンは麻痺側下肢のいわゆる不使用を助長すると考えられます。
そこで、歩行に必要な麻痺側下肢機能を回復させるために、非麻痺側下肢に模擬義足を適用した歩行訓練、下腿三頭筋による推進力を向上させるためのステッピング練習、外骨格ロボットの開発(ATRとの共同研究)などを試みています。
現在、附属病院(枚方)では、AMED(国立研究開発法人日本医療研究開発機構)の助成を受けて、歩行支援ロボットを用いた片麻痺歩行訓練に関する研究が行われています。
従来式の下肢ロボットでは不可能であった拮抗筋による足関節のstiffnessと角度の同時制御による足関節サポートが可能となり、下肢ロボット歩行練習による歩行機能改善が期待されます。
また、片麻痺歩行においては、運動麻痺や筋緊張異常に適応した歩行パターンが形成され、歩行速度低下の原因となります。
従来より用いられる装具や杖などの歩行補助具の使用は、代償的な手段と考えられますが、運動学的、運動力学的および筋活動など神経生理学的にも適切に機能回復させる可能性があります。
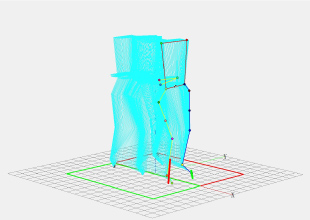
これらの効果判定は、3次元動作解析装置、床反力計(図B)、多チャンネル表面筋電図を用いて詳細に分析されます。
図B
短下肢装具脱着式歩行支援ロボットの臨床応用
国際電気通信基礎技術研究所(ATR)が開発した空気圧による人工筋肉によるロボット制御の特徴を活用して、普段使用している短下肢装具に装着して歩行練習ができる「短下肢装具脱着式歩行支援ロボット」の臨床応用を目指しています。
この人工筋肉の利点はパワーと調節性にあります。人工筋肉のパワーはケーブルを通じて、ATRが開発したモジュール関節により短下肢装具の足継手に伝えられます。モジュール関節は約500gで、金属支柱付き短下肢装具に1分余りで脱着可能です。大きなパワーを出力できるため、大型のロボットでなくては実現できなかった蹴り出し(push off)の練習が可能であるばかりか、足関節の背屈筋と底屈筋を同時に作用させることで足関節の硬さ(stiffness)を歩行練習に用いることができます。また、通常のロボットでは困難な、歩行周期毎にアシストを入れたり抜いたりする練習が実施可能ですので、歩行の運動学習を組み立てることができます。
歩行練習での制御対象を明確にするために、母趾球部の荷重量を圧センサーでフィードバックするシステムを導入し、歩行運動の末端効果器となる足関節制御を行う練習効果の検証を実施しています。普段使用している下肢装具に装着して練習することで、高い学習効果が得られることを期待しています。 (本研究は、国立研究開発法人 日本医療研究開発機構(AMED)「未来医療を実現する先端医療機器・システムの研究開発/先端医療機器の開発」(研究課題名:麻痺した運動や知覚の機能を回復する医療機器・システムの研究開発)における再委託研究の支援によって行われています。)
テレビ東京「話題の医学」(平成28年12月4日放送)より
短下肢装具脱着式歩行支援ロボットの治療効果(第一報)
短下肢装具脱着式ロボットの特徴
短下肢装具(Ankle Foot Orthosis、以下AFO)脱着式ロボットは、モーター駆動式の従来式ロボットと違ってギアがないために、アシスト力を発揮していない状態を作ることが可能です。したがって、床面から受ける他動的な床反力情報の処理や患者自身による能動的な運動を妨げることなく、足関節機能を練習させることができます。40Nm以上のアシスト力を発揮できるので、荷重下での足関節底屈運動を補助することで、歩くために身体を前へ押し出す感覚の再学習に有効であると考えています。
AFO脱着式ロボットとトレッドミル歩行訓練との比較
下図は、生活期の片麻痺患者さんを対象として、AFO脱着式ロボットによる歩行訓練を30分間X 15セッション行った場合(青線)と、歩行速度を徐々に上げながらトレッドミル歩行訓練を30分間X 15セッション行った場合(破線)の治療前(Pre)、治療直後(Post)及び1か月後(1M)の時点での結果を表しています(各2症例)。縦軸には、立脚後期に身体を前方へ押し出すための力(床反力前後成分における駆動力)の非麻痺肢に対する麻痺肢の割合を示しています。
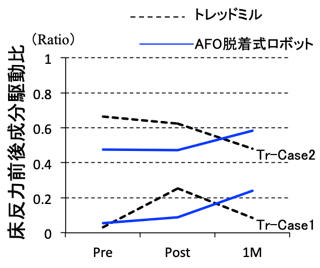
集中的な歩行訓練によって、麻痺肢による歩行推進力が訓練直後においては獲得できても、その治療効果が戻ってしまう場合が少なくありません。これは、非麻痺肢とのバランスにおいて患者さん自身が日常生活の中で非麻痺肢を使う事を選択した結果であると考えることができます(Tr-Case1)。また、麻痺肢での歩行を意識させた練習をいくら実施しても、非麻痺肢による機能的代償が訓練中において優先され、結果的に麻痺肢の機能回復には寄与しない場合もあります(Tr-Case2)。Bowdenら(※1)は、歩行訓練によって機能回復の誘導が困難な患者さんを‘non-responder’と呼んでいます。
AFO脱着式ロボットを用いた歩行訓練においても、非麻痺肢によって歩行推進力を得る練習が行われるため、訓練終了直後においては、非麻痺肢に対する麻痺肢の歩行推進力の割合に変化が見られないが場合があります。しかしながら、図の2症例では、訓練終了1か月後において、歩行推進力の比率を麻痺肢へシフトすることを患者さん自身が選択している点が、大きな特徴となっています。この治療効果は、足関節底背屈運動アシストを基本にした歩行リズム練習を展開することで、下肢伸筋群の荷重受容器(load receptor)が賦活され、麻痺肢立脚期の伸展パターン再建がもたらされるのではないかと考えています。
※1:Bowden MG, Behrman AL, Neptune RR, Gregory CM, Kautz SA:Locomotor rehabilitation of individuals with chronic stroke: difference between responders and nonresponders. Arch Phys Med Rehabil 2013;94:856-862
運動学習と脳機能
運動療法の治療効果は、目標とするパフォーマンスに必要な運動スキルを習得させるための運動学習をどのように実施したかによって大きく影響されます。課題の難度を調節して、運動スキルの習得に効果的なフィードバックを与えながら、課題を反復させることが運動学習の基本であり、したがって、学習者の能力に応じた運動課題の設定が重要になります。
リハビリテーション医療において運動学習を適用する際に考慮しなくてはならないのが、運動学習を司る神経機構の障害の有無です。運動学習能力に応じて、難度の設定やフィードバックの方法を選定しますが、これらの手続きは運動療法の場面で必ずしも体系的に行われているとは言えません。そこで、外乱や認知課題における立位制御の変化をとらえることで、内在的フィードバックに基づく学習能力を評価する試みを行っています。
また、中枢神経疾患患者の運動学習効果を高めるために、経頭蓋磁気刺激や電気刺激を併用した運動療法が試みられています(A)。経頭蓋直流電気刺激療法(tDCS)は、運動課題施行中に併用することが容易であることから、上肢機能訓練や嚥下訓練、高次脳機能訓練への臨床応用を実施しています。その1例として、半側空間無視患者のアイマークレコーダによる注視点解析では、物体(絵)の左側への注視を認めませんが(B)、tDCS後には注視点の左側への移動を生じるようになります(C)。
A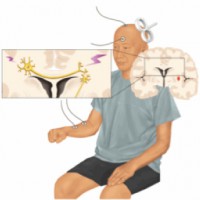
B
C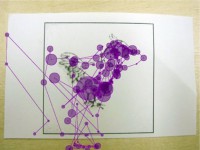
運動制御の解析
歩行や上肢運動機能における問題を抽出し、運動療法や手術療法の治療効果を機能的に評価するためには、運動軌跡の時間的・空間的な解析だけでなく、運動を引き起こしている力学的特性ならびに内力としての筋活動を同時にとらえる必要があります。運動の時間的・空間的解析には、ビデオ撮影に加えてシート式歩行解析機器、3次元動作解析機器を導入し、また、力学的解析には靴式およびプレート式下肢加重計を用いて、術前後の機能評価や下肢補装具評価などを行っています。
また、コードレステレメータ電極を用いた多チャンネル表面筋電図の同時計測によって、促通あるいは抑制を要する標的筋の同定や治療効果判定などに役立てています。
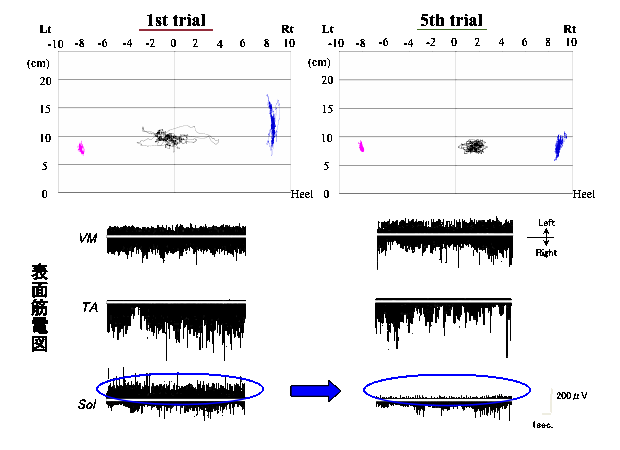
(下図)立位制御の適応過程(左片麻痺):片麻痺となってはじめて立位制御を試みた患者さんのプレート式下肢加重計による足圧中心軌跡(上段)と下肢表面筋電図(下段)です。立位制御の安定は重心動揺の中心を非麻痺側下肢へのシフトさせることで達成されていますが、その過程で麻痺側ひらめ筋の不使用が認められます。(VM:内側広筋、TA:前脛骨筋、Sol:ひらめ筋)
高次脳機能障害の眼球運動解析
高次脳機能障害ごとに特異的な注視パターンが出現するとされていますが、その報告数は少なく、解析も未だ十分にはなされていません。
注視パターンは視覚認知や探索行動に強く影響するため、その特徴について解析することによって、高次脳機能障害の機能回復や代償手段獲得、および支援方法の考案に寄与することが期待できます。
当院では注視点計測にメガネ型アイマークレコーダを使用しているため、机上課題実施時(A)だけでなく、歩行時(B)や食事動作時などのADL場面における注視パターンについての計測が実施できます。
そのため、より実生活に近い状況での実践的な評価が可能となっています。
さらに新たな取り組みとして、解析により明らかとなった注視パターンをフィードバックとして提供する介入方法が、トップダウン・アプローチとして有効かについて効果検証を進めているところです。
今後の展望として、高次脳機能障害だけでなく、パーキンソン病やアルツハイマー病などの神経疾患を対象とした同様の研究についても検討しています。
A
B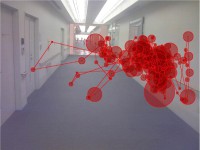
メガネ型アイマークレコーダ
主な研究テーマ
- 歩行支援ロボットを用いた片麻痺歩行の再建
- 脳卒中患者の眼球運動に基づいた高次脳機能評価とアプローチ方法の検討
- 脳卒中患者の垂直定位に影響を及ぼす眼球運動パターンの解析と姿勢制御との関連
- 脳卒中患者の歩行に影響を及ぼす歩行補助具とトレーニング方法の効果検証
- 動作解析機器を用いたボツリヌス毒素療法におけるリハビリテーション
- 立ち上がり動作時の上肢連合反応の評価-9軸センサーシステム動作解析による検討-
- 経頭蓋直流電気刺激(tDCS)の運動麻痺、高次脳機能障害、歩行障害への効果
- 嗅覚刺激と脳血流-近赤外線光トポグラフィ(NIRS)による検討-
- 前頭葉損傷者の高次脳機能評価実施時における血流変化と治療的介入法の検討
- 下肢人工関節術後における歩行,段差昇降能力の検討
- 股関節疾患患者の杖または補高の効果に関する歩行解析
- 肥満者の膝関節ストレス軽減のための歩行解析
- 食道がん術後患者の理学療法における認知行動療法の併用が健康関連QOLに与える影響の検討
- 胸腹部術後周術期の咳嗽力の調査
- 重症呼吸障害に対する人工呼吸器管理中の早期離床の効果検証